ROS (Robot Operating System) adalah proyek sumber terbuka yang menyediakan kerangka kerja dan alat untuk aplikasi robotika. Ini membantu merancang perangkat lunak yang kompleks tanpa mengetahui cara kerja perangkat keras tertentu.
Noetik adalah rilis LTS dari ROS dan disesuaikan untuk Ubuntu 20.04. Dukungan ROS Noetic hingga 2025 (5 tahun). Arsitektur yang didukung adalah amd64, armhf, dan arm64.
Dalam tutorial ini, kita akan memandu cara menginstal ROS Noetic di Ubuntu 20.04 .
1. Tambahkan repo Noetic Resmi ke Ubuntu
Langkah pertama dalam menginstal ROS Noetic adalah menambahkan repositori resmi ROS Noetic ke file daftar sumber Ubuntu 20.04.
Untuk menambahkan repo Noetic, ketik:
$ echo "deb http://packages.ros.org/ros/ubuntu focal main" | sudo tee /etc/apt/sources.list.d/ros-focal.listKeluaran:
deb http://packages.ros.org/ros/ubuntu focal main.2. Tambahkan gantungan kunci ROS resmi
Selanjutnya, tambahkan keyring ROS resmi ke sistem Ubuntu 20.04 Anda. Ada dua cara untuk melakukannya.
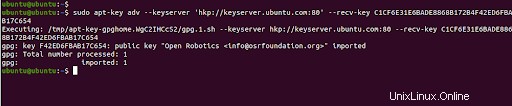
Metode pertama adalah menggunakan hkp://keyserver.ubuntu.com:80 server kunci Ubuntu. Jika ini tidak berhasil, Anda dapat mencoba menggantinya dengan hkp://pgp.mit.edu:80 . Jadi, jalankan perintah di bawah ini.
$ sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
Metode kedua adalah menggunakan perintah curl untuk mengunduh keyring ROS resmi dan menambahkannya secara lokal.
$ curl -sSL 'http://keyserver.ubuntu.com/pks/lookup?op=get&search=0xC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654' | sudo apt-key add -Output “OK”, berarti kunci telah berhasil ditambahkan.
3. Perbarui indeks paket ROS
Selanjutnya, kami akan memperbarui sistem Ubuntu kami untuk mendapatkan informasi paket ROS Noetic dari repositori.
$ sudo apt updateIni akan menyinkronkan repositori yang baru ditambahkan dengan repositori online Ubuntu.
4. Instal ROS Noetic di Ubuntu 20.04
ROS memiliki beberapa paket meta yang dapat Anda pilih untuk diinstal sesuai dengan kebutuhan spesifik Anda.
Berikut ini adalah metapackage ROS Noetic resmi:
- ros-noetic-desktop-full
- ros-noetic-desktop
- ros-noetic-ros-base
- Ros-noetic-ros-core
Pilih metapackage pilihan Anda dan instal dengan salah satu perintah di bawah ini.
Instal ros-noetic-desktop-full
Paket ros-noetic-desktop-full hadir dengan semua paket di ros-noetic-desktop dan juga paket persepsi (ros-noetic-perception) dan simulasi (ros-noetic-simulators).
Untuk menginstal ros-noetic-desktop-full, jalankan perintah berikut:
$ sudo apt install ros-noetic-desktop-fullSetelah Anda menjalankan perintah, tekan Y untuk melanjutkan instalasi.
Instal ros-noetic-desktop
Ros-noetic-desktop adalah versi minimal dari ros-noetic-desktop-full. Ini berisi sebagian besar paket tutorial termasuk:
- berhadapan
- sudut
- tutorial_umum
- tutorial_geometri
- ros_tutorials
- roslint
- urdf_tutorial
- visualization_tutorials
Untuk menginstal ros-noetic-desktop, jalankan perintah berikut:
$ sudo apt install ros-noetic-desktopInstal ros-noetic-base
Ros-noetic-base hanya berisi paket-paket dasar. Ini termasuk paket di ros_core dan alat non-robot dasar lainnya seperti konfigurasi ulang dinamis, nodelet, dan actionlib.
Untuk menginstal ros-noetic-base, jalankan perintah berikut:
$ sudo apt install ros-noetic-baseInstal ros-noetic-core
Ros-noetic-core berisi kumpulan paket minimal. Paket termasuk:
- pesan_umum
- gencpp
- genus
- genlisp
- genmsg
- gennodejs
- genpy
- generasi_pesan
- waktu proses_pesan
- pluginlib
- ros
- ros_comm
- rosbag_migration_rule
- roskonsol
Untuk menginstal ros-noetic-core, jalankan perintah berikut:
$ sudo apt install ros-noetic-core5. Siapkan lingkungan ROS Noetic
Langkah selanjutnya adalah mengatur lingkungan ROS Noetic. Pertama sumber skrip setup.bash di setiap terminal bash yang menggunakan ROS, ketik:
$ source /opt/ros/noetic/setup.bashTambahkan file .bashrc yang terletak di direktori home Anda untuk menghindari berjalan setiap kali Anda meluncurkan shell baru:
$ echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrcVerifikasi dengan menjalankan perintah berikut:
$ tail ~/.bashrc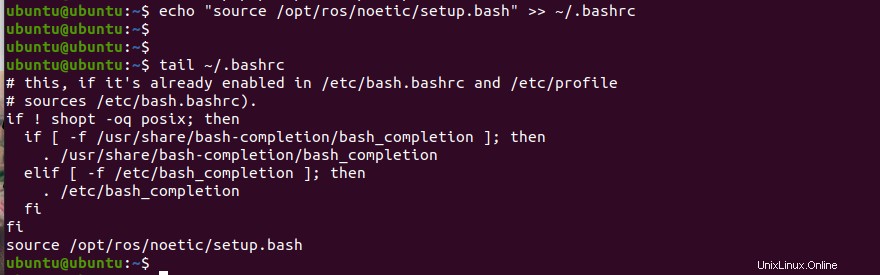
Agar perubahan diterapkan, ketik:
$ source ~/.bashrc Verifikasi pemasangan Noetic
Setelah berhasil menginstal ROS Noetic di Ubuntu 20.04, cukup jalankan perintah roscd.
$ roscdAnda akan melihat bahwa direktori saat ini dari prompt Anda berubah menjadi /opt/ros/noetic , di situlah kami menginstal Noetic.

Kami juga dapat memverifikasi pemasangan dengan menjalankan roscore perintah di direktori noetic. Output menampilkan distro ros dan versi ros dalam ringkasan.
$ roscore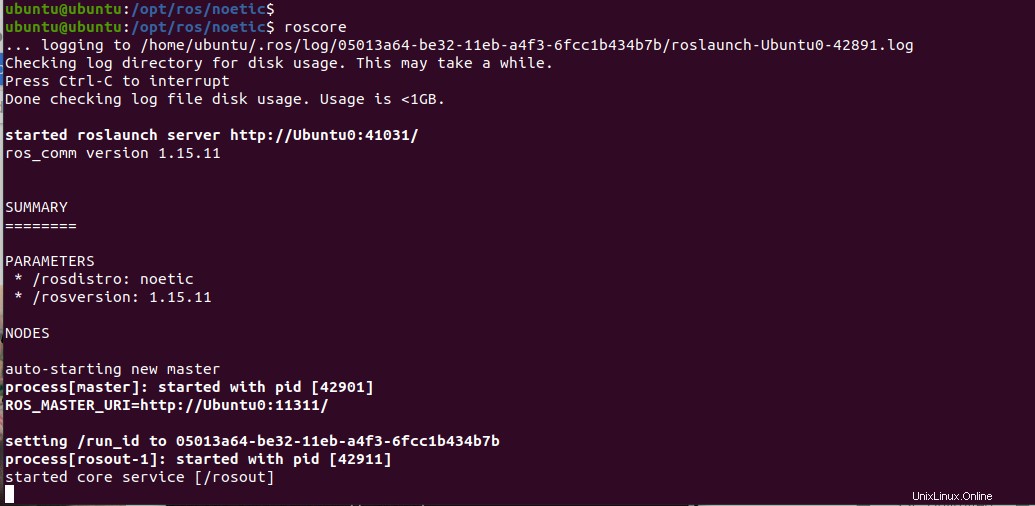
Kesimpulan
Dalam tutorial ini kita belajar cara menginstal ROS Noetic di Ubuntu 20.04. Sekarang Anda dapat memprogram robot Anda menggunakan Noetic.